|
||||||||||
| This page last modified: 2009/04/28 The 3D work finished: 2007/11/02 |
||||||||||
|
Simulation of Harmonic Drive
Using more than 100 objects, I tried to make the setups for a harmonic drive and took simulations with Bullet in Blender 2.44. After lots of trial, its motion started to look realistic and it could give you a good explanation on how a harmonic drive system works. Please take a look at the following video to see what it is like.
And then I baked the simulation and made an animation from the Ipo curves. Some materials and modifiers were set to get the scenes more realistic. In the Video Sequence Editor, the clips of the scenes were combined to make the following finished video.
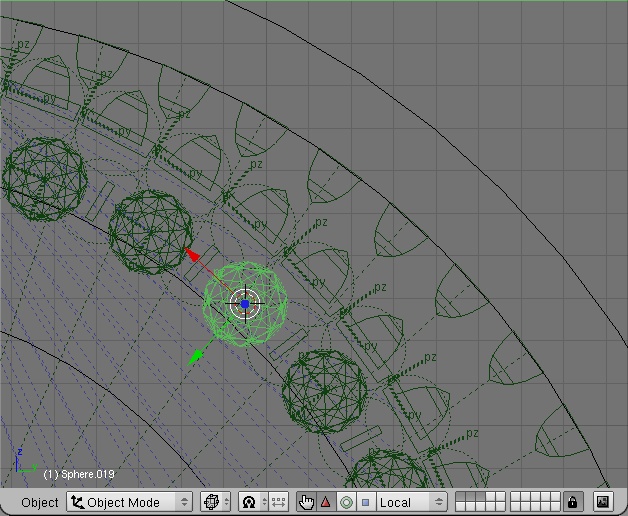
Setting Constraints The wireframe image in the right side shows how I made the setups to the objects. I had to make lots of effort for setting constraints of Rigid Body to link each object and putting them in appropriate intervals between the neighbor objects to move them smoothly in simulations like a chain. Then the simulations started to look realistic. New and Nice The harmonic drive has so strange a gear arrangement that I couldn't understand which parts of the components were going to rotate until I saw an introduction video for it at a web page of a company that sells its productions. However, the commercial video appeared to be made after defining the trajectories to move objects by hand like editing Ipo curves in Blender and it appeared not to be using simulation of a physics engine or something like that. So I thought it would be new and nice if a video is created based on a simulation calculated by a physics engine for the harmonic drive, and I tried it. About Harmonic Drive
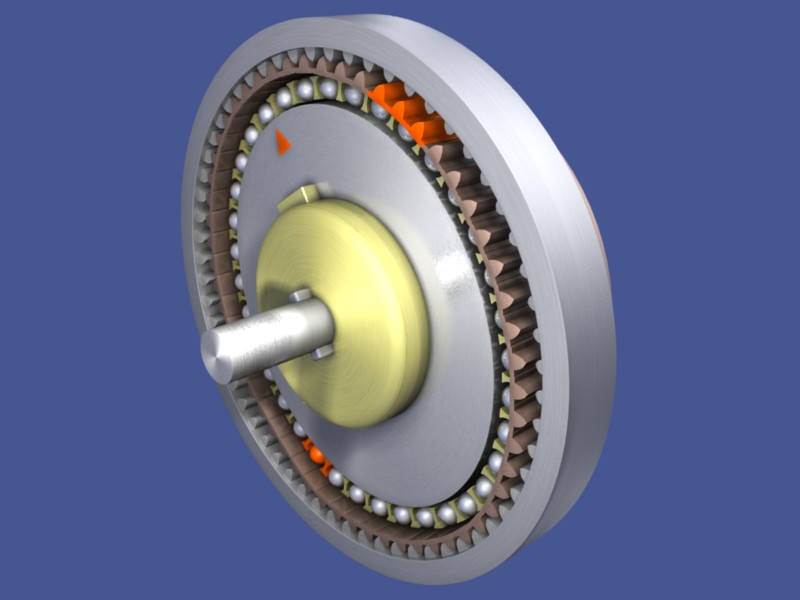
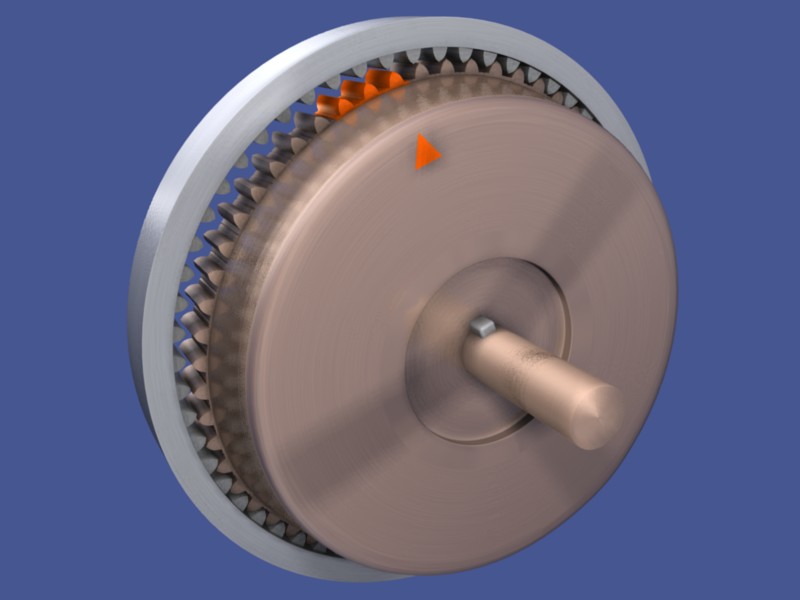
A harmonic drive is used to reduce rotational speed and to allow higher torque to be transmitted. It is often used as a reduction gear in robot arms because of its compact size. It consists of a wave generator, bearing, flexspline and circular spline that are seen in the left image in the same order as described. If you want to know more of the details, please visit wikipedia. |